

Updates
- We hope you’ll consider submitting an abstract to the session entitled “Using ground-based time-lapse imagery in ecohydrological studies: Data, software, and applications” at the AWRA/UCOWR/NIWR conference (https://awra.org/Members/Events_and_Education/Events/2024-Joint-Conference/2024_Joint_Abstracts.aspx; Topical Session Code = G). All are welcome! There is also an AI in Watershed Analysis session.
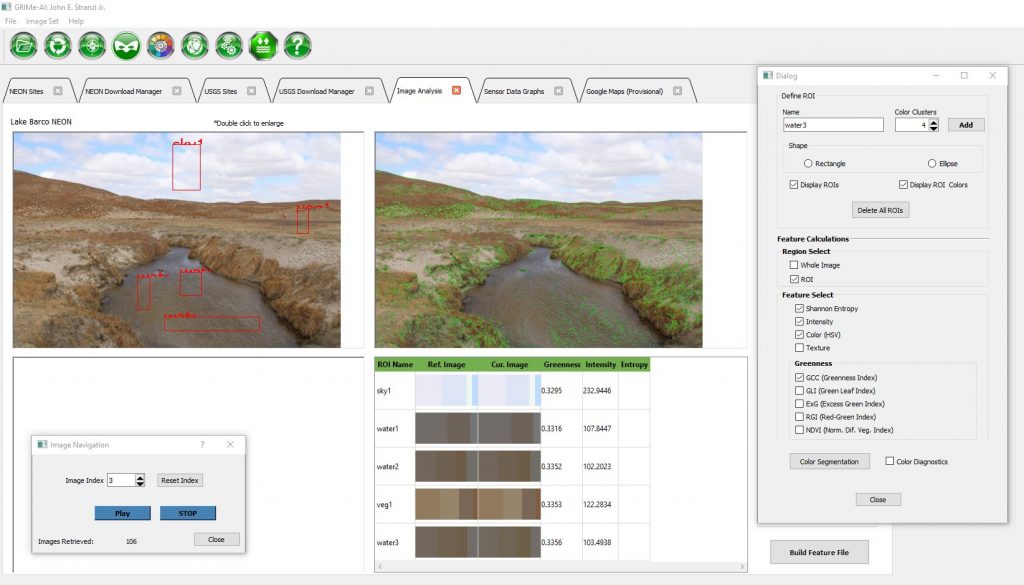
- GRIME-AI features continue to expand. As part of the image triage (data cleaning) step, we now calculate and store image rotation (camera movement) information for each image.
- We have had several new GRIME2 releases as we work with a group that is testing octagon targets at their river monitoring sites.
Feature Photo Information
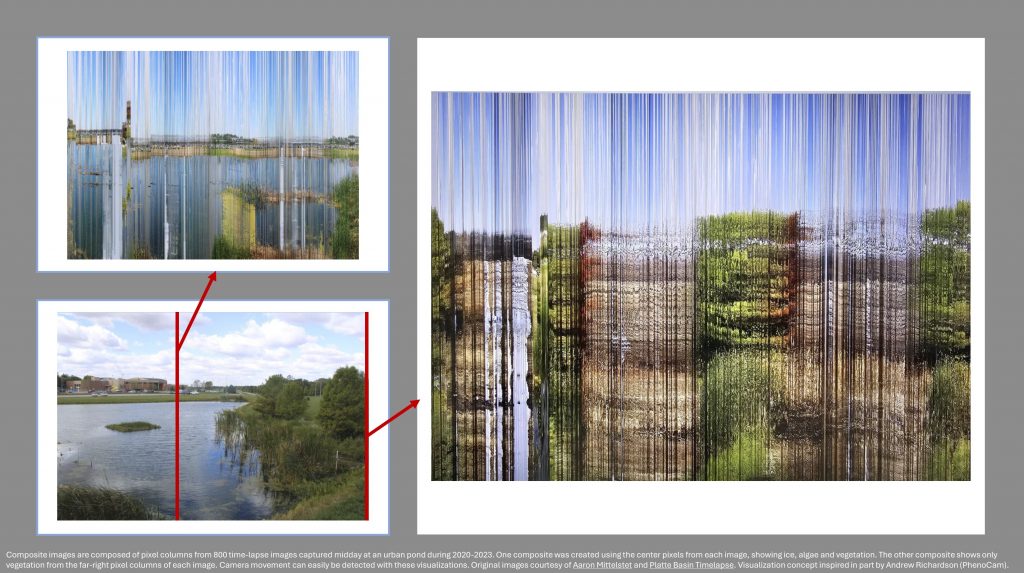
The attached figures are composite images composed of pixel columns from 800 time-lapse images captured midday at an urban pond during 2020-2023. One composite was created using the center pixels from each image, showing ice, algae and vegetation. The other composite shows only vegetation from the far-right pixel columns of each image. Camera movement can easily be detected with these visualizations. Original images courtesy of Aaron Mittelstet and Platte Basin Timelapse. Visualization concept inspired in part by Andrew Richardson (PhenoCam).
Thanks for viewing!