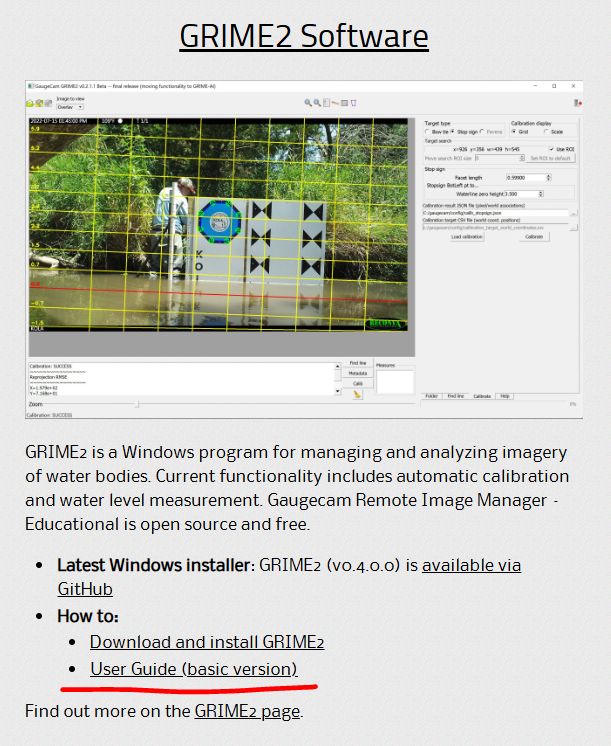
This week we created a basic user guide for GRIME2. Our next step is to work through some bugs we encountered along the way. More documentation to follow, including image timestamp handling and a how-to for using command line tools.
We hope you’ll consider submitting an abstract to the session entitled “Using ground-based time-lapse imagery in ecohydrological studies: Data, software, and applications” at the AWRA/UCOWR/NIWR conference (https://awra.org/Members/Events_and_Education/Events/2024-Joint-Conference/2024_Joint_Abstracts.aspx; Topical Session Code = G). All are welcome! There is also an AI in Watershed Analysis session.
GRIME-AI features continue to expand. As part of the image triage (data cleaning) step, we now calculate and store image rotation (camera movement) information for each image.
We have had several new GRIME2 releases as we work with a group that is testing octagon targets at their river monitoring sites.
Feature Photo Information
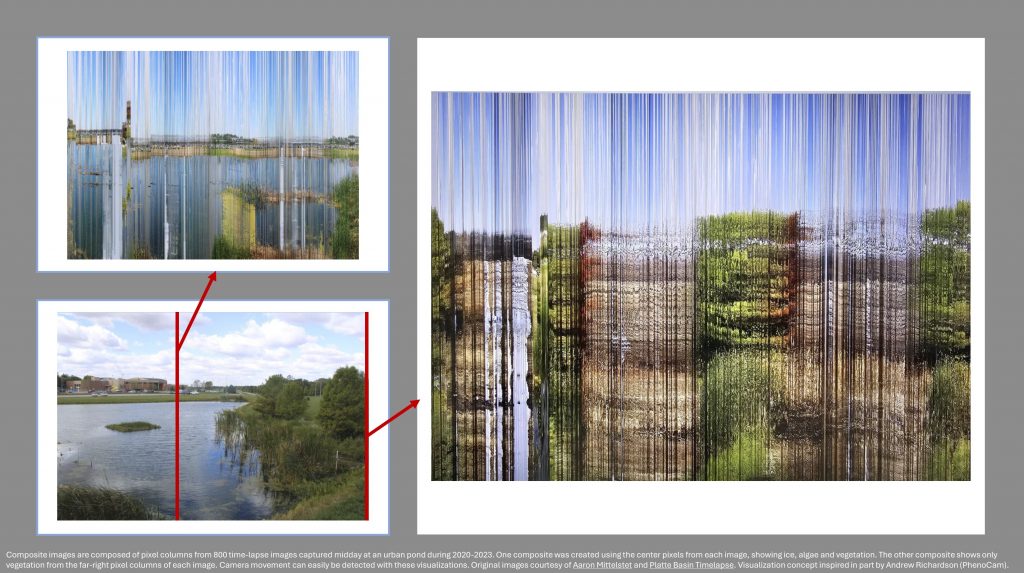
The attached figures are composite images composed of pixel columns from 800 time-lapse images captured midday at an urban pond during 2020-2023. One composite was created using the center pixels from each image, showing ice, algae and vegetation. The other composite shows only vegetation from the far-right pixel columns of each image. Camera movement can easily be detected with these visualizations. Original images courtesy of Aaron Mittelstet and Platte Basin Timelapse. Visualization concept inspired in part by Andrew Richardson (PhenoCam).
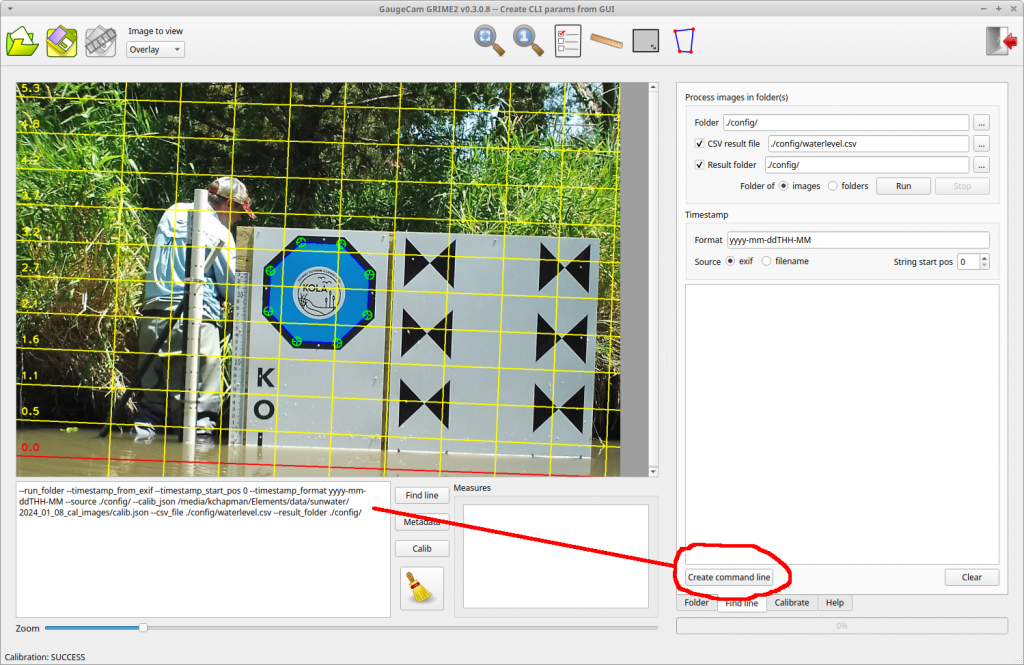
This release makes the creation of CLI calls much easier. The ROI’s and other parameters you select in the GUI can be used to create CLI parameters and output them as test to the textbox below the main image. There are two “Create command line” buttons: one on the Calibration tab and one on the Find Line tab.
We have a new GRIME2 release. It is a bug-fix release that allows the program to run a little more quickly and use less disk space when the octagon target is used. We were creating unneeded debug information and images that have been removed.
Download and use the following installer to replace the previous software:
This post describes the first testing of a mini-octagon calibration target for measuring water level with a camera and machine vision algorithms.
Mini-octagon (center) is approximately eight inches across, leading to a much smaller footprint for the target background. The other two octagons in the image are printed on plexiglass backgrounds two feet in width. Image credit: Mary Harner
The original GaugeCam “bow-tie” calibration target was about three feet wide and four feet tall. This target yielded excellent calibration and precise water level readings. However, the size of the target is obtrusive in images and prohibitive at some sites.
The next generation calibration target, the “octagon target,” is approximately two feet wide. The benefits of the octagon are that (1) the target footprint is much smaller, and (2) the calibration target remains above the water line, so a calibration can be performed for every image. Calibrating each image is more robust because it accounts for camera movement, which is inevitable. The large octagon target performs on par with the original bow-tie calibration target, as shown in Ken Chapman’s dissertation.
Our goal with the mini-octagon is to reduce the target background to the minimal size required for robust calibration and water level measurement. The current size is larger than a traditional staff gauge but reasonable size for installation in many environments. Below you can see our field fabrication of the first mini-octagon, using a sheet of Coroplast, spray paint, and octagon stencil.
Test installation of the mini-octagon target at Kearney Outdoor Learning Area (KOLA). Photo Credit: Mary Harner
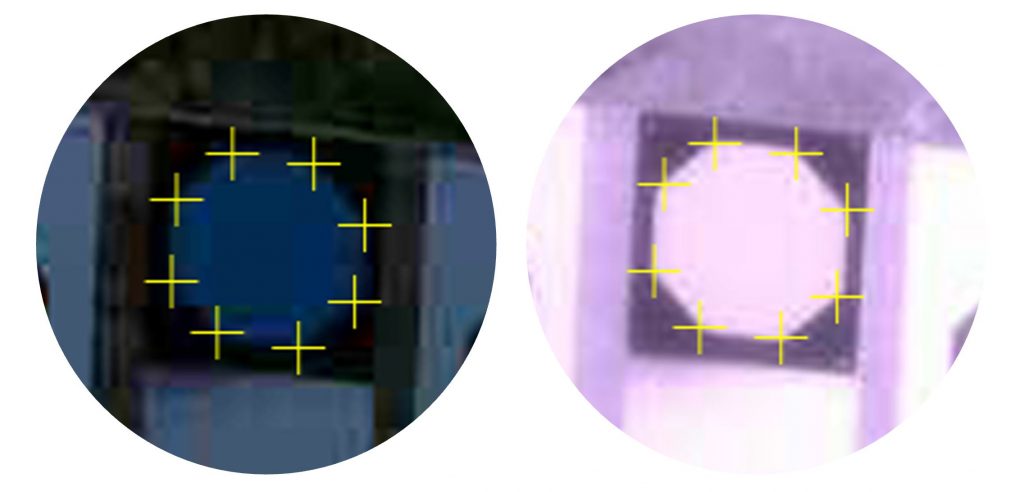
Initial tests show that our algorithms can detect the vertices of the mini-octagon in low-light conditions and under IR illumination.
Mini-octagon detection for image calibration. We are working to determine how much calibration precision is reduced by the smaller octagon.The latest KOLA imagery can be found at https://apps.usgs.gov/hivis/camera/NE_Kearney_Outdoor_Learning_Area_RISE.