

Here are example test images from the Kearney Outdoor Learning Area (KOLA). This segmentation model was tuned as part of our USGS-funded project looking at 11 HIVIS sites.
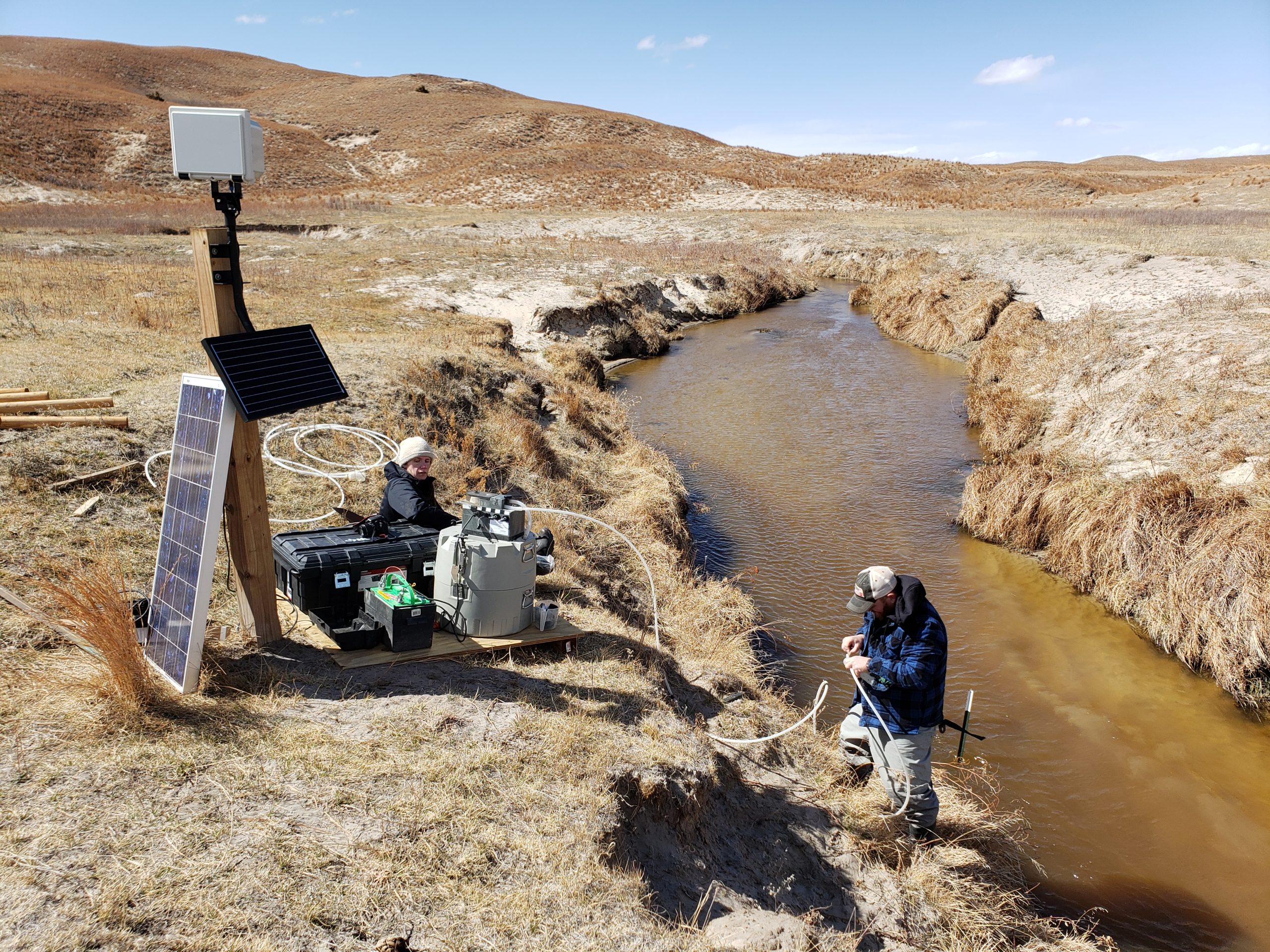
IMAGE 1: Water segmentation on a test image using the KOLA-specific model. In other words, the model was trained at this site, but this image was not used in the training.
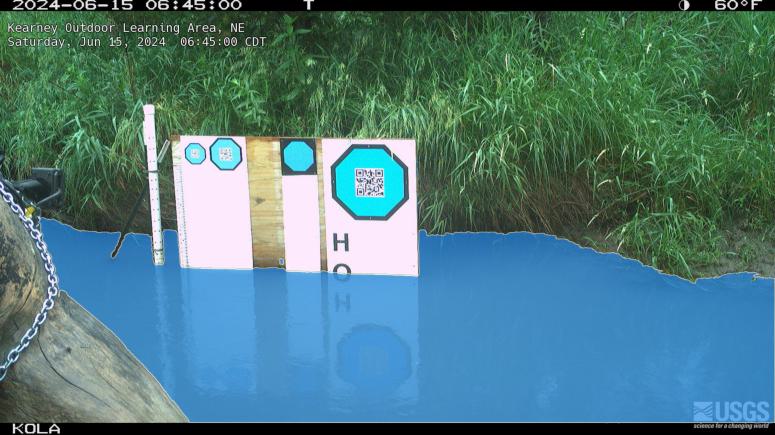
IMAGE 2: Water segmentation on a test image using the KOLA-specific model. This image comes from a second camera at this site. The camera that captured this image can be seen in IMAGE 1, above.
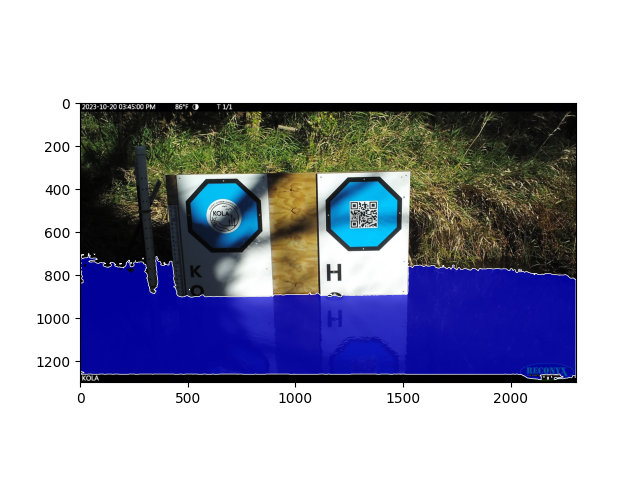
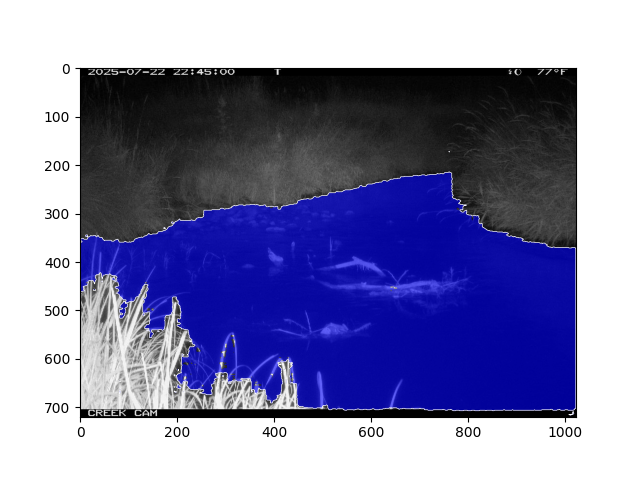
IMAGE 3: This camera was not used in any of the model training for this project. The segmentation was done using a general model that was trained across all 11 sites in the project. Note that grass in the lower left corner has been incorrectly identified as water, along with some rocks in the stream. But overall, the model performance is strong.
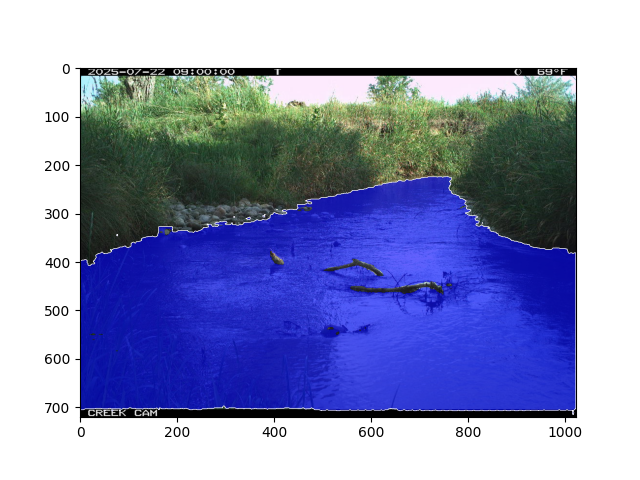
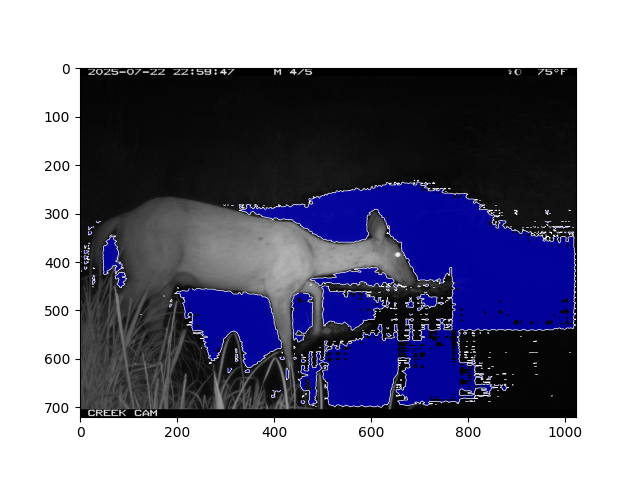
IMAGE 4: Under IR illumination at night, the model performance is good in terms of identifying the stream banks. The grass in the lower left is identified. The branch and other items in the stream are not classified correctly.
IMAGES 5, 6, and 7: Water segmentation with wildlife in the imagery.
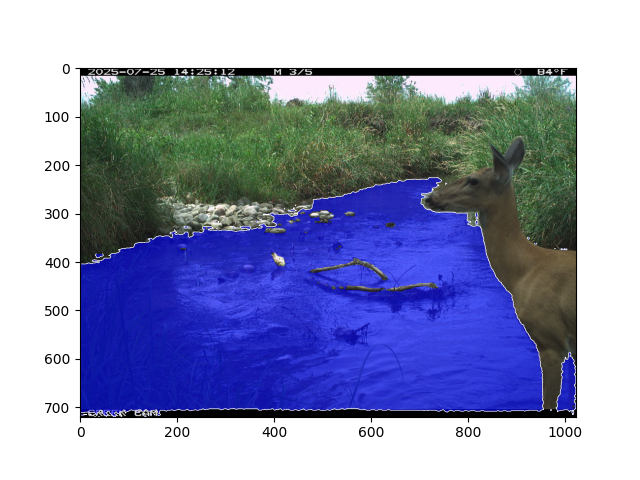
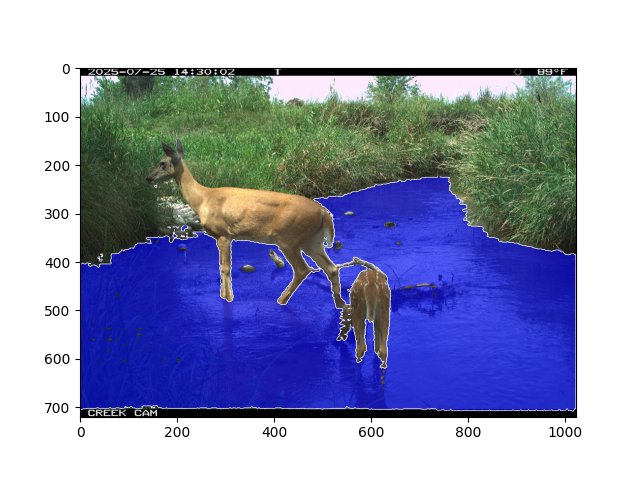
This material is based upon work supported by the U.S. Geological Survey under Grant/Cooperative Agreement No. G23AC00141-00. The views and conclusions contained in this document are those of the authors and should not be interpreted as representing the opinions or policies of the U.S. Geological Survey. Mention of trade names or commercial products does not constitute their endorsement by the U.S. Geological Survey.